Soldiers today can launch pocket-sized drones to check out terrain ahead of them. But if a promising Army project proves out, a future soldier might deploy a host of “shape-shifting” particles that form themselves into whatever they need to accomplish the mission.
That would include a robotic swarm that could become its own bridge to cross a river before reforming into another shape for the next phase of the mission, one official said.
A recent report published by researchers at the Georgia Institute of Technology and Northwestern University has taken a new approach to robot building, using “smarticles” that could lead to new ways for robots to move, according to an Army release.
RELATED
“People have been interested in making a certain kind of swarm robots that are composed of other robots,” said Dan Goldman, a physics professor at Georgia Institute of Technology. “These structures could be reconfigured on demand to meet specific needs by tweaking their geometry.”
These could be especially useful to soldiers in rough terrain that is daunting for current types of robots, such as forests, caves or urban areas.
The initial idea came when Nick Gravish, a former doctoral student who is now a faculty member at the University of California-San Diego, noticed that when he poured heavy-duty staples into a container with removable sides and then removed those sides, the staples held a shape on their own.
By entangling those staples, the smaller pieces together created a larger structure.
The research has the potential to make robots capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, part of the Army Combat Capabilities Development Command’s Army Research Laboratory.
But all of that shifting requires the collective response of many particles.
“We are not looking to put sophisticated control, sensing and computation on them all,” Goldman said. “As robots become smaller and smaller, we'll have to use mechanics and physics principles to control them because they won't have the level of computation and sensing we would need for conventional control.”
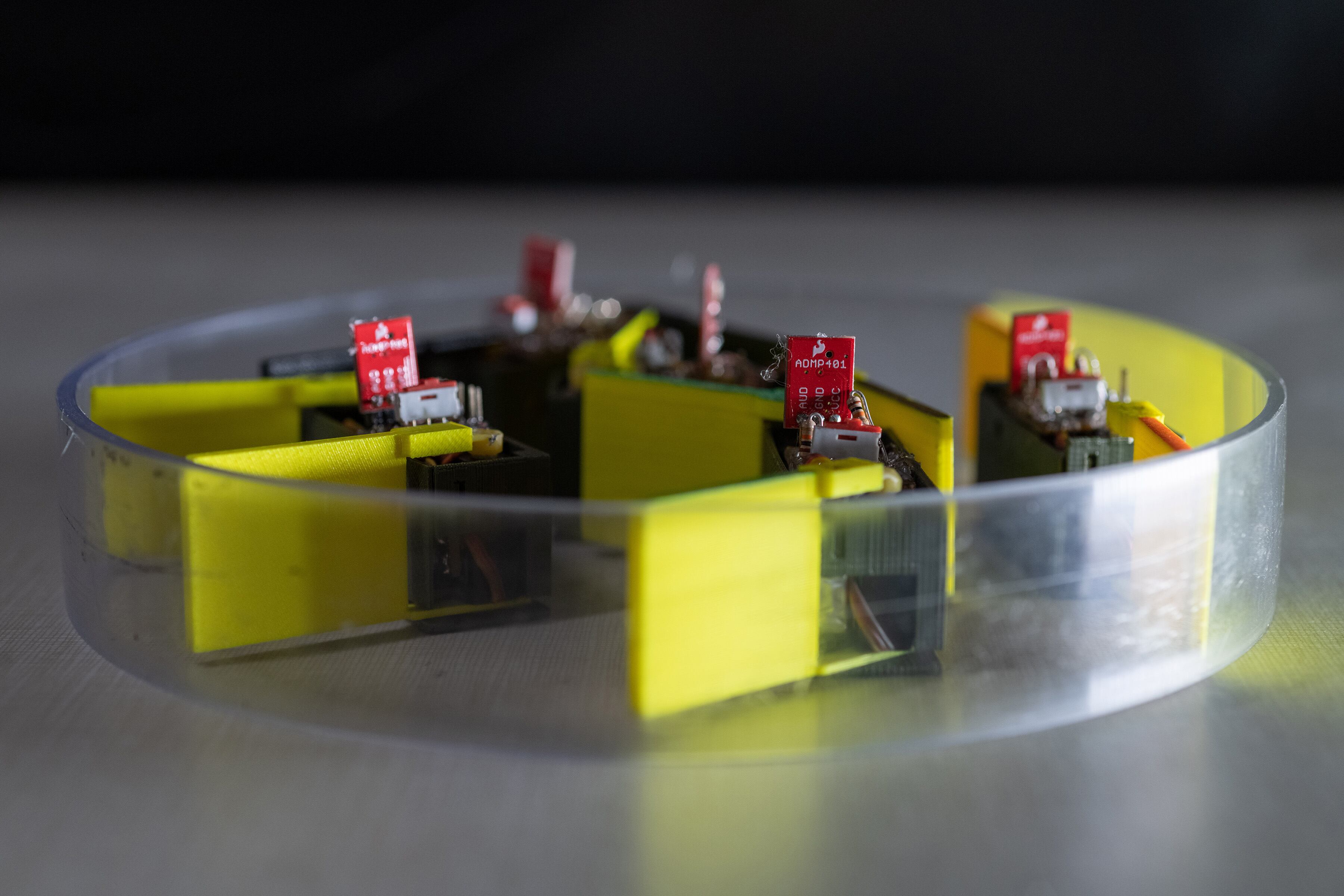
Researchers used a 3D printer to create battery-powered smarticles with motors, simple sensors and low-level computing power.
They can change their location, but only when interacting with other devices and inside of a ring enclosure, according to the release.
"Even though no individual robot could move on its own, the cloud composed of multiple robots could move as it pushed itself apart and shrink as it pulled itself together,” Goldman said. “If you put a ring around the cloud of little robots, they start kicking each other around and the larger ring — what we call a supersmarticle — moves around randomly.”
And if one of the small robots stopped moving, perhaps because it lost power, the other smarticles would move toward it. By then adding photo sensors, the researchers could control the arm flapping of the particles with a strong beam of light.
“If you angle the flashlight just right, you can highlight the robot you want to be inactive, and that causes the ring to lurch toward or away from it, even though no robots are programmed to move toward the light,” Goldman said.
That gave researchers a crude way to steer the particles.
Todd South has written about crime, courts, government and the military for multiple publications since 2004 and was named a 2014 Pulitzer finalist for a co-written project on witness intimidation. Todd is a Marine veteran of the Iraq War.